组合导航二次开发生态系统
| WMSOFT |
组合导航二次开发生态系统 |
| 返回主页 |
陀螺寻北仪 利用高精度MEMS陀螺仪,实现姿态测量以及方位角测量,不受磁场干扰。客户用此装置测量地下钻孔的方向。
|
高精度大量程运动测量装置 包含陀螺仪、加速度计、磁强计、卫星定位仪、数据记录仪、电源,灵活的模块化设计,实现高达2000 deg/s和400g的高精度运动测量。客户用此装置测量山体落石的运动过程
|
惯导机器人数据处理 利用惯性测量单元、里程计等,采集管道机器人的运动数据,推算管道机器人的位置。该技术已被3家管道机器人研发机构采用。
|
动态姿态测量装置 利用高精度IMU,配备或不配备卫星定位仪,实现动态环境下的姿态测量。本技术已被多家研发机构采用,用于车载光电观瞄、动中通天线等。
|
农用车辆自动驾驶系统 采用RTK差分卫星定位,以及惯性测量装置,实现高精度位置速度姿态测量。用于农用车辆自动驾驶系统,车辆自动驾驶精度2.5 cm。
|
水下导航数据处理 融合惯性、多普勒DVL、短基线或超短基线定位等。本技术已被多个研发机构采用。
|
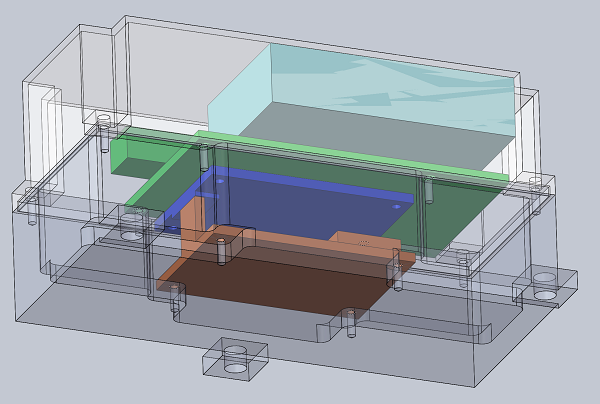
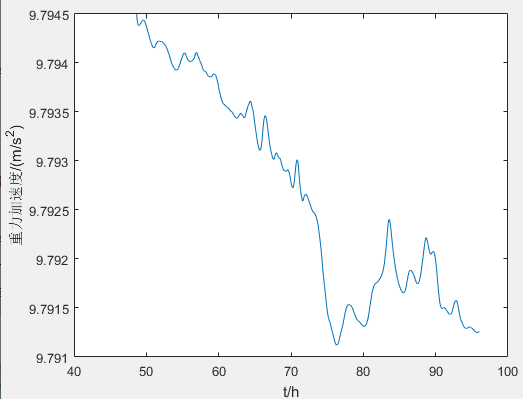
重力测量数据处理 采用高精度惯性导航装置,以高度不变为约束条件,计算当地重力。
|
军用导航系统 多型军用导航系统。包括MEMS惯导、光纤陀螺惯导,传递对准技术等。详情主页微信咨询。
|